Sachin Sulkunte

University of Maryland at College Park
- B.S. Computer Engineering 2024
- Minor in Robotics and Autonomous
Systems
- Cybersecurity Honors Program
View My LinkedIn Profile
View My Github Profile
Contact Me:
E: sulkunte@gmail.com
C: (301) 605-0719
SLAM Implementation
Visual SLAM - ORB (Oriented FAST and Rotated BRIEF)
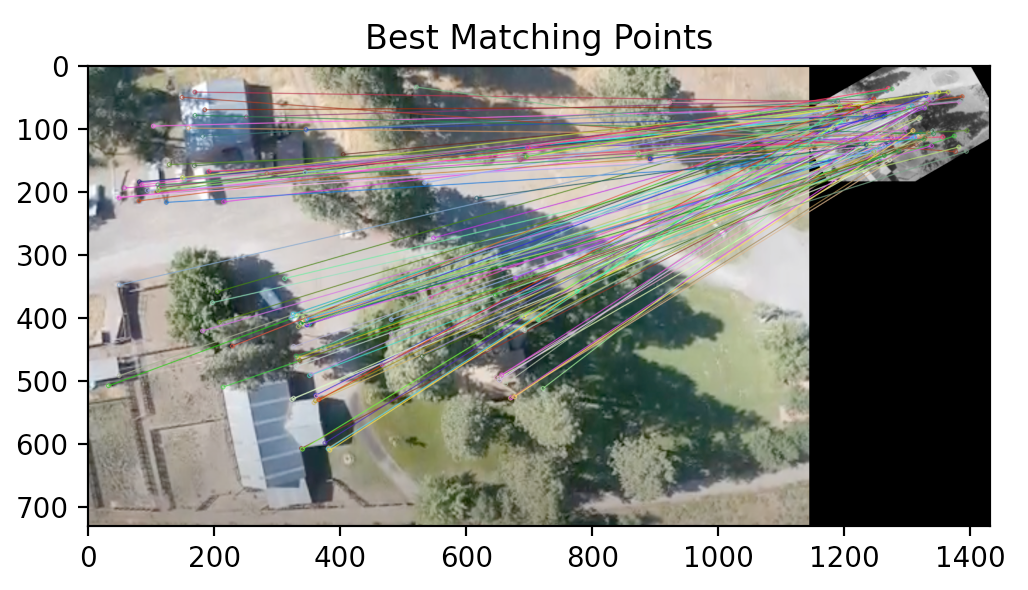
I implemented ORB-Slam in order to create a visual SLAM system that could operate utilizing data from monocular cameras. Example images are shown below:
Starting Image Frame

Keypoint Detection
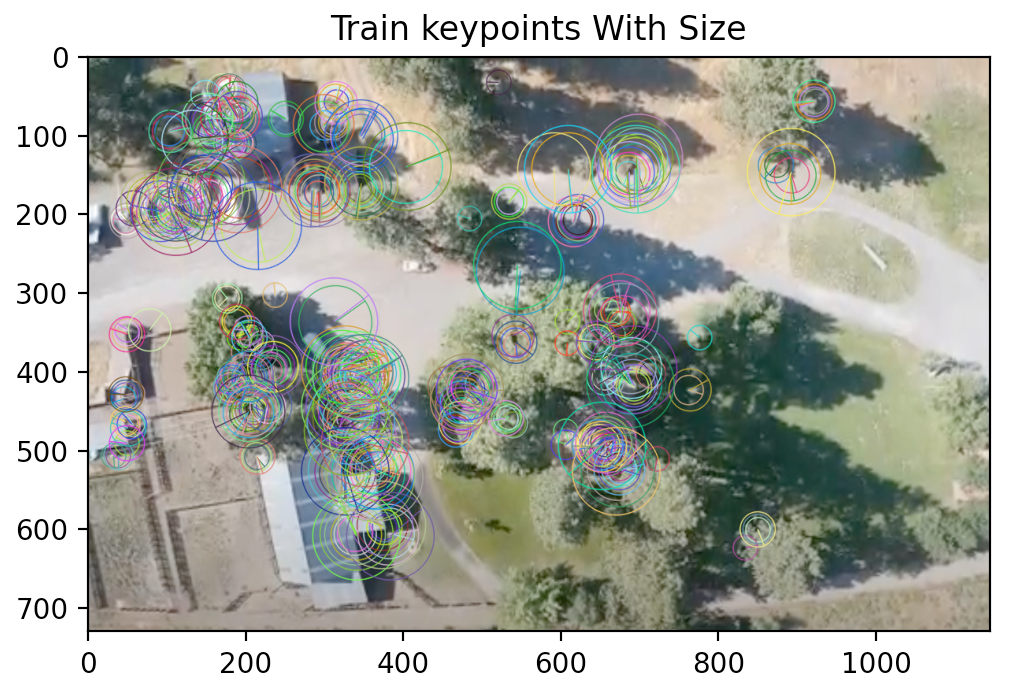
Extracted Features
LIDAR-Based Implementation
This is a work in progress. Having built the sensor simulation, my next step is to define line features using a feature extraction algorithm similar to the one described in the paper below. This will operate on the raw LIDAR data generated by my LIDAR simulation. This information will allow me to take the raw LIDAR data and extract features in order to return a full defined-map based on the 2D point data which could be used for navigation.